
發布時間:2022-12-01作者來源:趙敏 英諾維盛公司瀏覽:2374
各位觀眾、聽眾朋友們,大家好!我今天給大家講座的題目是:智能制造、工業互聯網中的四個智能范式的共存與進階。
首先,我講一下智能制造的主攻方向與工業互聯網創新發展。
說到智能制造主攻方向與工業互聯網創新發展,我們可以看到,智能制造、工業互聯網在中國已經推進了多年,從中央到地方高度重視,取得了階段性應用成效,形成了規模宏大的產業生態。有關研究報告顯示,智能制造、工業互聯網的產業規模已經突破萬億人民幣。正在不斷催生新模式、新業態,為實體經濟、數字經濟高質量發展,提供了新動能。
《中國制造2025》綱領性文件中闡明,智能制造是主攻方向,工業互聯網是智能制造落地的關鍵基礎設施。多年的兩會政府工作報告,多個中央文件都強調要加快工業互聯網的創新發展。
從2014年在全國開始推動,智能制造、工業互聯網也發展了有七八年了。下一步,智能制造、工業互聯網創新發展之路該怎么走,是一個值得深刻思考的問題?發展智能制造、工業互聯網,有沒有模式,有沒有內在規律?到底該以什么模式發展智能制造、工業互聯網?
從總體思路上來說,智能制造、工業互聯網作為一種工業轉型升級的具體活動形式,必須秉持以人為本的基本原則。
智能制造、工業互聯網的出發點:為人服務;智能制造基礎設施、企業信息集成新方法論、企業數字化轉型新路徑,其“表”是更好的研發制造,其“里”是更好的為人服務,如個性化定制、無人工廠、自動駕駛、常人做專家工作、人離開系統回路等,其“實質”是發展智能系統。
智能制造、工業互聯網的落腳點:利人賦能;在為機器設備賦能的同時,必須為人賦能,人機協同,人機都更加智能。
智能制造、工業互聯網智能出處:人智為源;與智能制造系統一樣,智能制造、工業互聯網也是智能化系統,其智能來源于人。
智能制造、工業互聯網理想目標:人類大同;[敏感詞]發展目標是共建全人類的數字文明,打造人類命運共同體。
在為人服務、利人賦能、人智為源、人類大同的基礎上,我綜合對業界的長期觀察和研究結論,提出了發展智能制造和工業互聯網的四個智能范式。
從2015年開始,走向智能研究院9位創始研究員開始撰寫“走向智能叢書”第一本書,其名為《三體智能革命》,對形形色色、大大小小的各種智能系統現象進行了橫向比較、打通研究,我們對智能的學術觀點是“三體皆有智能”:
以人為代表的生物體有智能;電腦里的“軟件虛體”有智能;物理實體也有智能。三種“體”交匯融合,發展出來豐富多彩的人造智能系統。
人造智能是人造系統所具有的一種模仿、拓展和超越人類智能的能力。
模仿——人造系統具有某種類似人的智能;
拓展——不僅具有人的某種智能,甚至拓展為兼具其他生物智能;
超越——超越人的智能,成為超級智人,或其他形式的高階智慧體;
工業智能、人工智能、認知計算、人造大腦等,都是人造智能的子集。
在《三體智能革命》書中,我們提出了“三體智能模型”,倡導以人為本來進行工業轉型升級的思考。
在書中,提出了一種全新的世界觀:即在宏觀上,把世界分為三個“體”來進行研究:
物理實體:機器/設備/產品/材料等實體類人造系統;
意識人體:人體,人腦,人智,對“人”重新認識;
數字虛體:軟件/網絡/電腦中以比特構建的數字體。
也提出了一種全新的方法論:三體交匯形成智能系統(智能體)。各種形式人造系統向智能系統演進過程中,人智起著決定性作用。
意識人體本意是人的意識體,思考體,智力體。不宜把“人”理解為籠統抽象的“人(H)”,應將“人”細分為人體、人腦、人智,因為:
第一次、第二次工業革命以更高效的動力系統解放了人體,第三次工業革命以電腦解放了人腦,第四次工業革命將以賽博物理系統CPS解放人智。必須清晰理解工業革命成因。
在2018年寫的《機·智:從數字化車間到智能制造》書名,明確提出“機·智”(即機器所具有的智能的簡稱)這個概念。在《機·智》書中第7章第三節(P170),指出:
而到了第四階段,會出現大規模的“勞動力轉型”,即人體、人腦離開系統回路,基于“人智”的數字化勞動力(智能機器)大規模登場,真正實現機器換人,以泛在聯接、自主自治的智能機器來拉動經濟的徹底轉型。
在《機·智》前言寫到:如果說《三體智能革命》是站在社會的宏觀視角,以各行各業智能系統演進的大視野對智能理論進行了深入研究和比較宏觀的論述,那么本書則是站在企業微觀視角,把三體智能模型中的基本邏輯用于對智能制造的深入研究。我們的理解是,正是因為數字虛體與其他兩體的交匯與融合,才讓機器有了智能,才有了今天的智能制造。
在2020年撰寫的《鑄魂:軟件定義制造》明確提出了:“人智”轉“機智”,作為一種發展智能制造和工業互聯網的智能范式。我們作者在前言中寫到:
作者梳理了以智能制造為主攻方向的新工業革命內涵,總結了其五個基本特征:
第一個基本特征就是“人智”轉“機智”——人類知識不斷進入軟件,知識載體由以碳基知識為主轉向以硅基知識為主,數字生產力激增;
在《鑄魂》數字化第一章第四節詳細解讀了該智能范式的構建方法(P45):通俗地說,所謂智能制造就是一個“人智變機智”的過程——即把人的智能(簡稱“人智”)以顯性知識的形式提煉出來,進行模型化、算法化處理,再把各種模型化(機理模型、數據分析模型等)的知識嵌入軟件,軟件嵌入芯片,芯片嵌入某個數字裝置/模塊,再把該數字裝置/模塊嵌入到物理設備中,由此而賦予機器一定的自主能力,讓機器具有一定程度的“智能”(簡稱“機智”),我們將這個過程稱之為“賦能”。
在今年年底,由我和朱鐸先、劉俊艷合著,即將在機械工業出版社出版的新書《人本:從工業互聯網到數字文明》中,最終以第八章整整一章的形式,確定了四個智能范式。詳細闡述了四個智能范式的內涵、由來和應用案例:
第一范式:“人智”轉“機智” ——打好基礎;
第二范式:“機智”群自治 ——量變引起質變;
第三范式:“機智”哺“人智” ——回饋智源;
第四范式:雙智融新智(雙智共融惠人) ——融合發展。
上述四個智能范式已在工業和科技領域的實際應用中逐漸形成,有序發展,為新工業革命的順利開展打下了良好的范式基礎。
四個智能范式,由我本人在2021年沈陽工業互聯網大會華為論壇上首次講演提出,并以專題文章發表在2022年《金屬加工》雜志的智能制造特刊上。
[敏感詞],我首先介紹第一范式:“人智”轉“機智”。
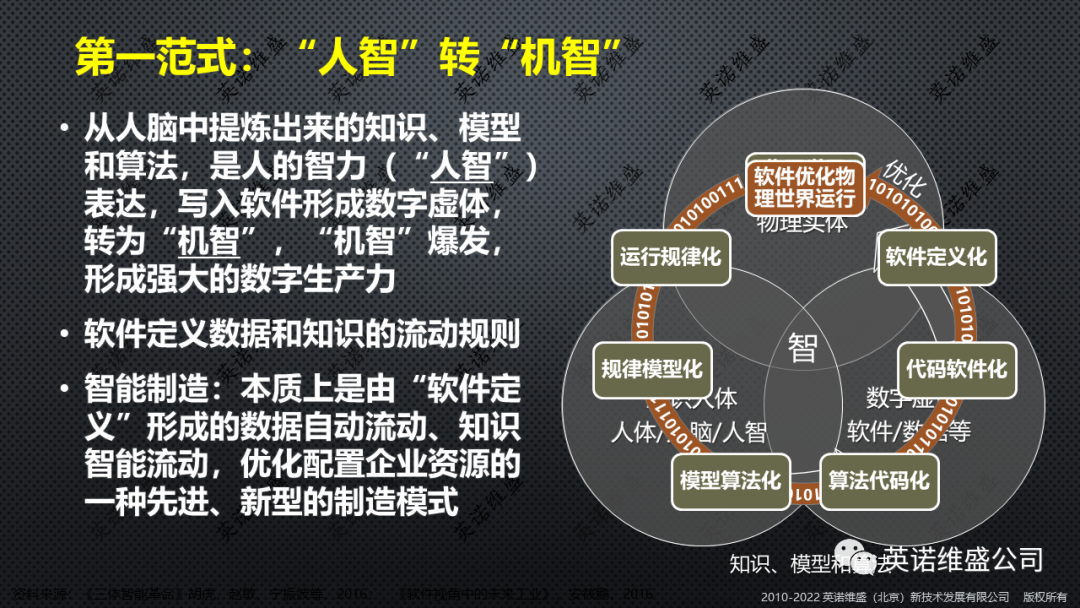
所謂“人智”轉“機智”,是指:從人腦中提煉出來的知識、模型和算法,是人的智力(簡稱“人智”)的表達,寫入軟件形成數字虛體,轉為機器的智能(簡稱“機智”),“機智”爆發,形成強大的數字生產力。
智能制造:本質上是由“軟件定義”形成的數據自動流動、知識智能流動,優化配置企業資源的一種先進、新型的制造模式。
如右圖所示:從常理和表面上來理解,賽博物理系統CPS是一種典型的兩體相互作用,但是實際上,由于經過優化篩選的顯性知識不斷積累,“人智”不斷以知識的形式轉化到人造系統中形成“機智”,經過日積月累,“機智”逐年增多,日益增多,其結果是人腦逐漸從系統回路中撤出,最終不在系統回路中出現,但是“人智”仍然以軟件的形式駐留在人造系統中,一直在系統回路中作為知識引擎來驅動智能系統(如智能制造)的實現。
物理世界不斷運行,并且進行著如下的循環迭代:運行規律化,規律模型化,模型算法化,算法代碼化,代碼軟件化,軟件定義化,經軟件定義,不斷迭代、優化物理世界的運行。這就是“人智”轉“機智”所能起到的巨大作用。
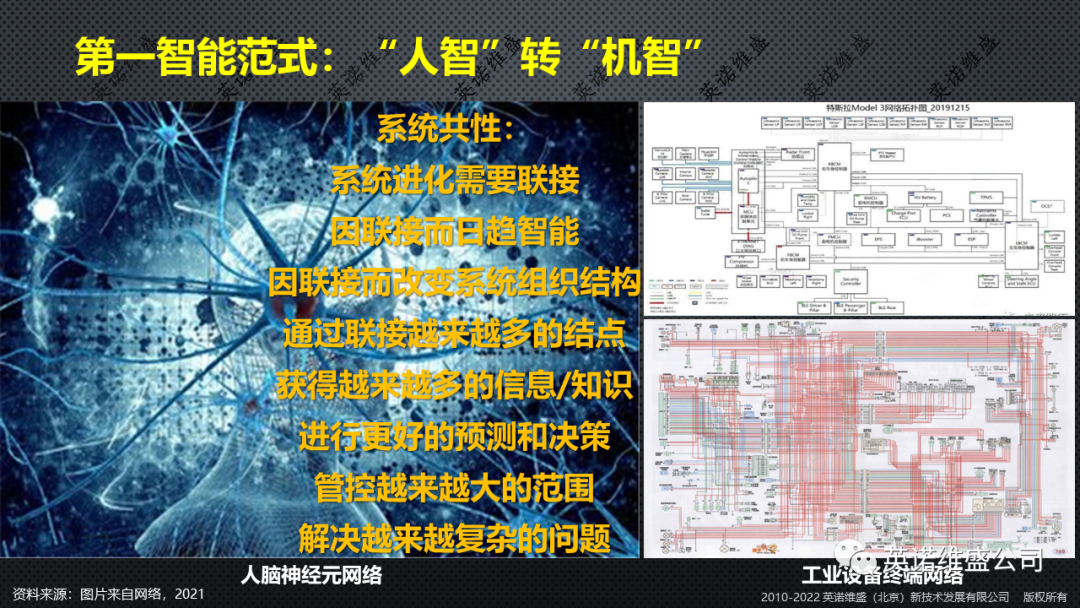
“人智”轉“機智”的另一層意思是:從左邊圖中的人腦神經元網絡,到右邊圖中復雜的工業設備終端網絡,右上圖是特斯拉汽車的網絡拓撲結構,右下圖是一個工廠中的工業終端的布線與聯接圖,左右兩類圖,是完全不同的系統,但是其系統共性是:
系統進化需要聯接,因聯接而日趨智能,因聯接而改變系統組織結構,通過聯接越來越多的結點,讓結點之間流動更多的信息和知識,并由此而獲得越來越多的信息和知識,進行更好的預測和決策,管控越來越大的范圍,解決越來越復雜的問題。
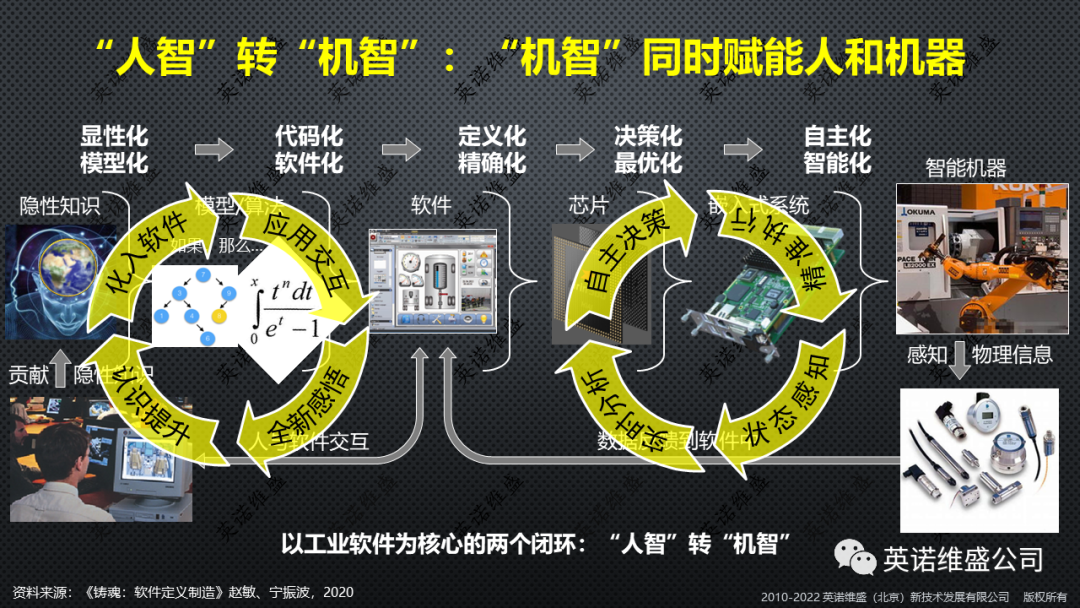
“人智”轉“機智”的基本原理是,“機智”以工業軟件的形式,同時賦能人和機器。如圖所示。
通俗地說,所謂智能制造就是一個“人智變機智”的過程——即把人的智能(簡稱“人智”)以顯性知識的形式提煉出來,進行模型化、算法化處理,再把各種模型化(如機理模型、數據分析模型等)的知識嵌入軟件,軟件嵌入芯片,芯片嵌入某個數字裝置/模塊,再把該數字裝置/模塊嵌入到物理設備中,由此而賦予機器一定的自主能力,讓機器具有一定程度的“智能” ,我們將這個過程稱之為“賦能”。
如此,機器在軟件支撐下具有了一定的人類思考能力,當軟件算法越好,芯片算力越強,工業數據越多,“機智”程度就越高。于是,當“機智”達到一定程度后,就具備了部分或完全替代人體/人腦的功能。當人體/人腦離開了工作場景的系統回路后,機器在無人參與的情況下,仍然可以像人在現場時一樣自主工作,甚至還可以工作得更好,較好地優化了企業制造資源的配置。
在上圖中,工業軟件處于“C位”,是兩個閉環的交匯點。在對機器賦能過程中,實現了“狀態感知,實時分析,自主決策,精準執行“的閉環;
在對人的賦能過程中,實現了“認識提升,化入軟件,應用交互,全新感悟”的閉環。
第二范式是:“機智”群自治。
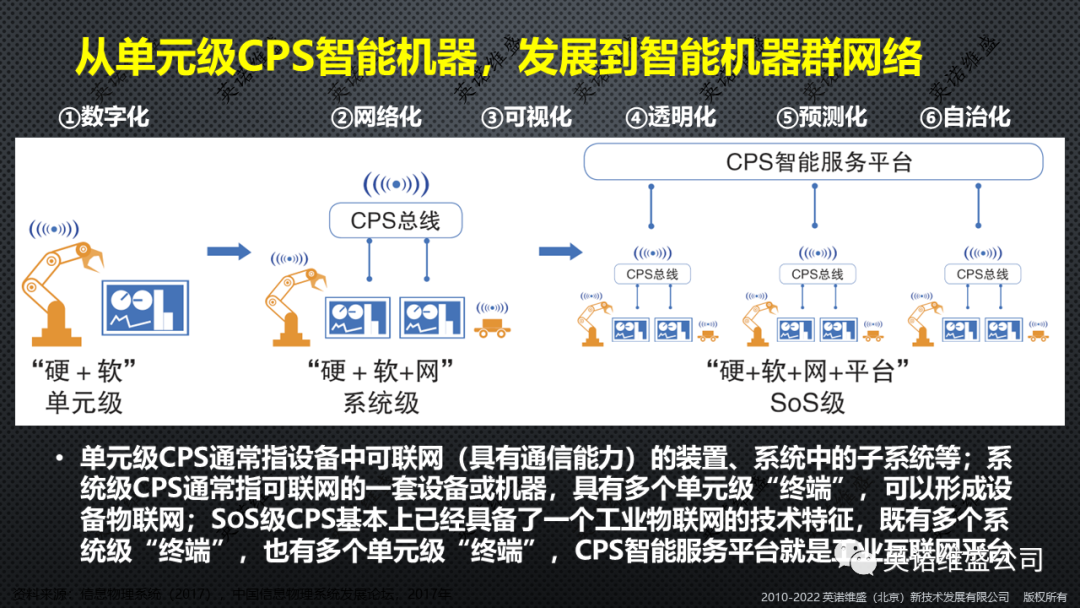
賽博物理系統CPS相當于是一種智能系統。在工信部發布的2017版《CPS白皮書》中,對CPS的尺度和形態進行了定義,分為:單元級CPS,系統級CPS,系統之系統(即SoS)級CPS。實際上這張圖指出:智能產品的發展,是從單元級CPS智能機器,發展到智能機器群網絡。
單元級CPS通常指設備中可聯網(具有通信能力)的裝置、系統中的子系統等;系統級CPS通常指可聯網的一套設備或機器,具有多個單元級“終端”,可以形成設備物聯網;SoS級CPS基本上已經具備了一個工業物聯網的技術特征,既有多個系統級“終端”,也有多個單元級“終端”,CPS智能服務平臺就是工業互聯網平臺。
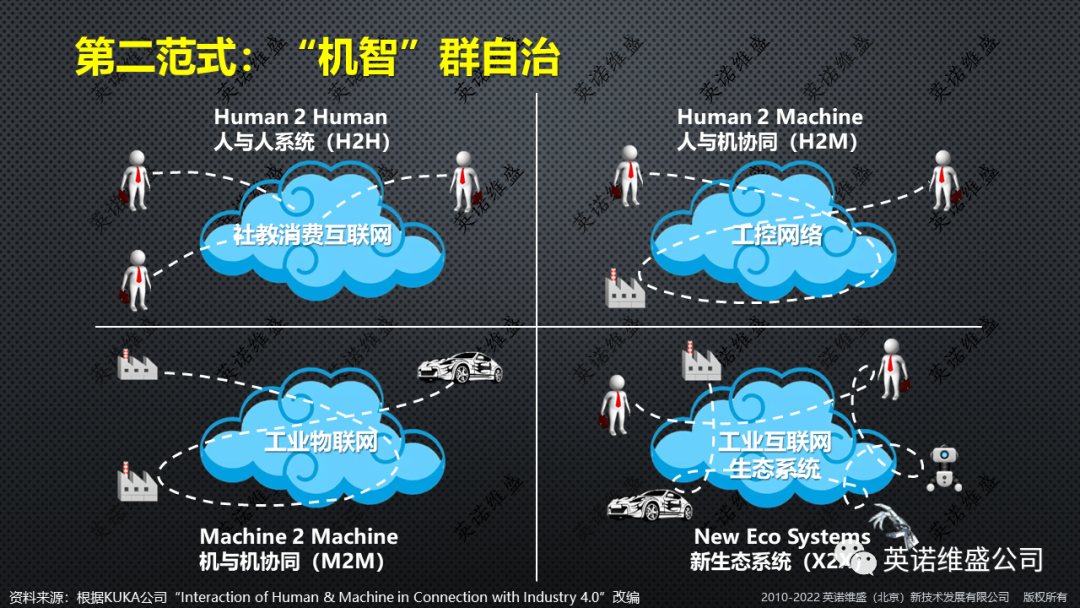
對于機器群自治的形成過程,在國外也有相應研究,這是我根據KUKA公司題為“(工業4.0中的人機交互聯接,Interaction of Human & Machine in Connection with Industry 4.0”的報告內容所繪制的演變過程圖:
早期的社交、消費互聯網實現了人與人系統(H2H)的聯接;
在工廠的工控設備中實現了人與機協同(H2M)的聯接;
后來在2002年,大眾公司提出了“機與機協同(M2M)“,即Machine 2 Machine,機器引導機器的概念;
最終要實現的是一種人與人、人與機、機與機的工業互聯網生態系統的聯接。
其中,Machine 2 Machine,機器引導機器,即形成了智能的第二范式:“機智”群自治。

第二范式目前已經以多種形式、多種場景予以實現,例如,黑燈工廠,無人車間,都是在企業邊界內部實現生產設備的“機智”群自治的典型例子;
而跳出企業邊界,在已經交付使用的產品中,自動跟馳車隊,是由一個有人駕駛的卡車,引領2-3輛無人駕駛卡車,保持合適的間距和速度,進行跟馳駕駛。這樣可以節省兩個卡車司機的崗位。未來,進一步的改進是,頭車也變成無人駕駛汽車。
類似地,飛機也實現了“機智”群自治,現在已經可以做到有人機(J20)引導幾架無人機(攻擊-11)進行協同飛行和作戰。
當所有的無人機都在技術上進化到智能無人機時,當每架智能無人機的成本大大下降時,智能無人機群的整體作戰能力將會有飛躍式的提升,因為這種智能無人機群不存在中心控制,完全是對等的分布式控制,可以利用復雜系統的“涌現”的場景,來隨時自主指定任何一架智能無人機來擔任整個無人機群指揮者,不必擔心因為某個指揮者損失后整個機群陷入“群龍無首”的窘境,由此而極大地提高了機群的魯棒性(抗打擊韌性和可持續作戰能力),形成強大的群體智能。
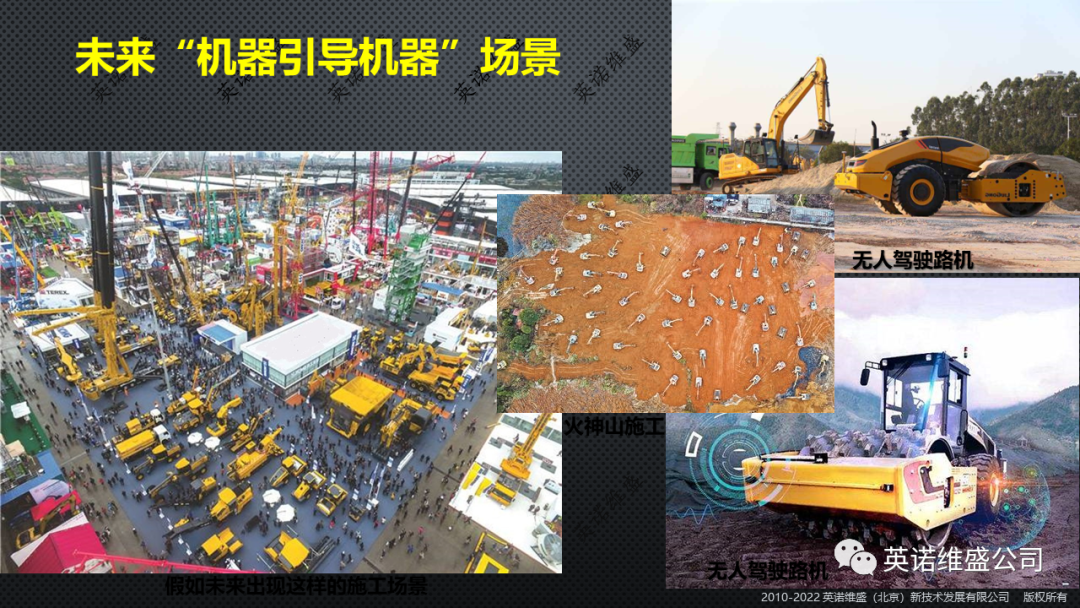
以無人施工現場為例,當諸如挖掘機、裝載機、壓路機、鋪布機、泵車等移動作業的工程機械具有較高“機智”水平時,每臺工程機械上的駕駛員或操作員將會離開操作工程機械的“系統回路”,工程機械將會以智能模式自主工作。設想在一個類似于雄安建設、機場建設、或者防疫醫院(如火神山/雷神山醫院)建設等面積超大的施工現場,可能會有數百或上千臺無人駕駛的智能工程機械參與施工建設,來自不同生產商的可移動作業的工程機械之間,包括車與車之間、車與路之間,車與場地之間,都需要相互識別、通信和保持協同,按照預先指定的作業運行規則彼此推理、判斷、謙讓或規避,以求獲得[敏感詞]的系統整體運行效率和最佳施工質量。
因此,所有工程機械基于工業互聯網的互聯互通是最起碼的前提條件,保持實時的“狀態感知、實時分析、自主決策、精準執行”是最基本的操作模式,而彼此認知、數據共享、相互協同、[敏感詞]地減少和消除各種失誤、障礙和低效,是考驗整體系統的重要指標。
第三范式是:“機智”哺“人智”。
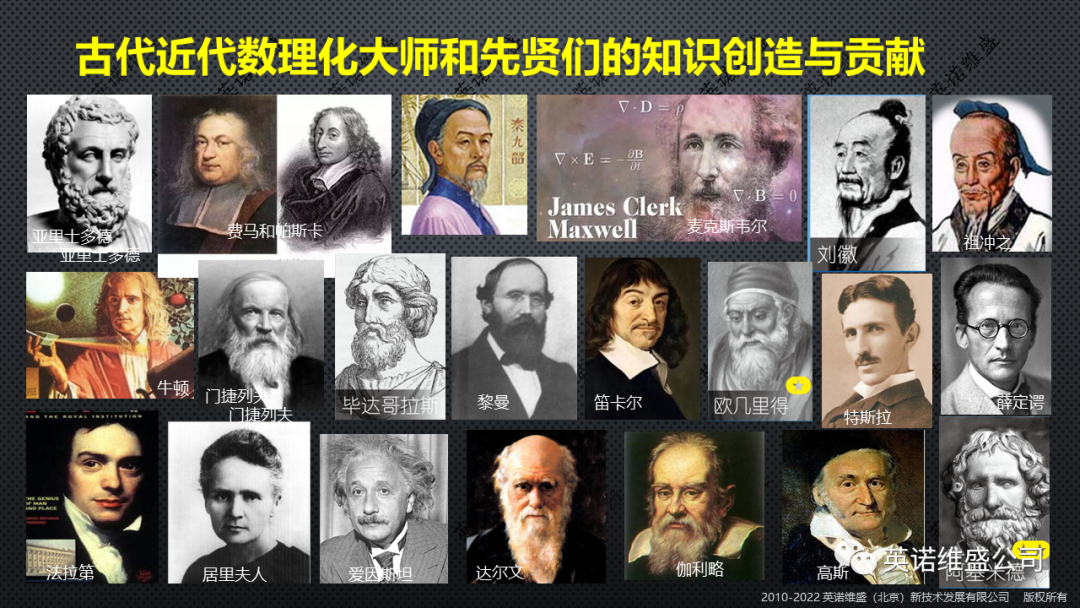
古代、近代數理化大師和先賢們的知識創造與貢獻,是“人智”中的精華,是那些[敏感詞]的數學公式、物理公式、化學方程式、機理模型的締造者,當我們把他們創造的這些科學知識,與工業的專業知識、領域知識融合在一起,并匯聚到工業軟件中時,就形成了強大的數字化知識體系。

海量工業技術、知識匯聚在工業軟件中,工業軟件就變成了工業的工具箱、知識容器、思想寶庫,以“知識容器”的形式,承載了人類海量知識,形成了“集智應用”,即如前所述,當你使用工業軟件時,那些古代、近代數理化大師和先賢們所創造的物理知識、化學知識、數學知識、各種專業技術知識等,都會由你來任意調用,召之即來,如前圖所示,那些偉大的先賢們、大師們,就站在你的身后,集中所有前人的智慧,為你所用。

今天,我們處于兩個百年的歷史交匯期。我們面臨著百年未有之工業大變局。工業軟件從未如此受人重視,被人關注。
無論是在賽博空間,還是在物理空間,還是在賽博物理交匯的數物融合新空間,工業軟件都在不斷匯聚著“人智”,生成著“機智”,不斷以人為本,利人賦能,不斷創造著新的價值。

“機智”哺“人智”有很多的應用場景,例如,利用軟件輔助人思考決策,甚至直接讓軟件采用智能算法,代替人腦來自主決策;
智能穿戴外骨骼設備,輔助人來做各種反復提升、比較費力、可能對人體有害的工藝動作;
智能裝置讓人成為專業高手,例如智能籃板可以保證,無論以什么角度和力度投籃,只要能把球砸到籃板上,就能進籃筐,確保100%的投中率。
有人監管自主駕駛汽車,已經使用了好幾年了,極大地降低了人的駕駛操作的勞動強度。
人車路協同V2X的激光空間感知定位,可以讓車輛自動識別空間場景,代替人對下一步的駕駛意圖做出智能判斷。
利用AR設備,輔助裝配防呆防錯,或者進行產品裝配與維修培訓等。
第四范式是:雙智融新智。
在前三個智能范式的基礎上,人與機,機與機,機與人,以及這三種相互作用關系映射在數字空間中的數字孿生體,也在彼此相互作用。“人智”和“機智”融合成為一種更高水平的綜合智能。
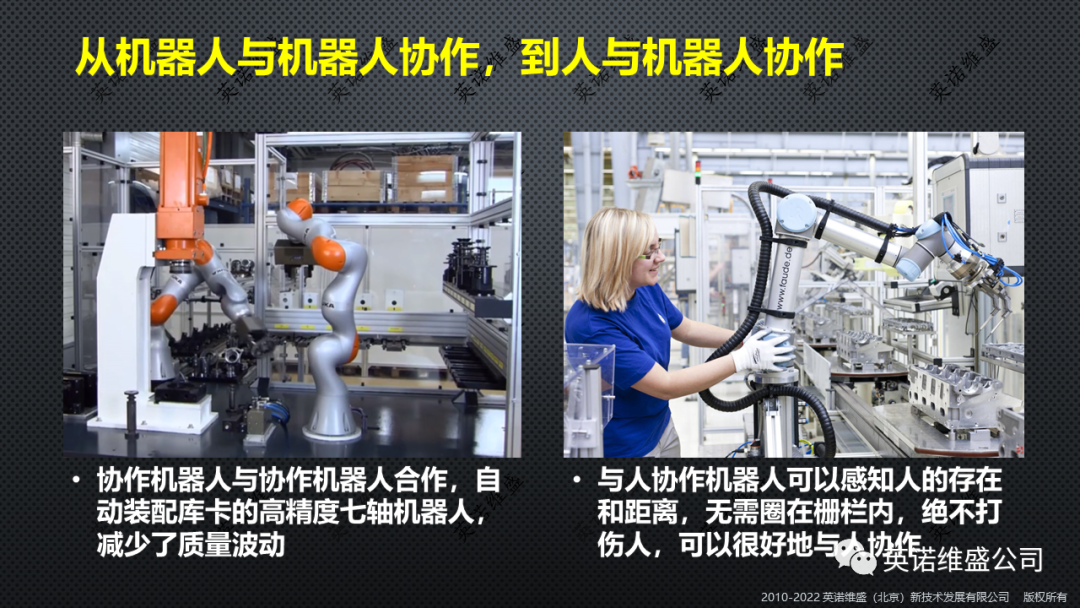
例如,庫卡的協作機器人與協作機器人合作,自動裝配庫卡的高精度七軸機器人,由于比人的裝配操作更加精準和規范,減少了質量波動。
再例如,與人協作機器人可以感知人的存在和距離,無需像常規車間中的工業機器人一樣,圈在柵欄內,它可以與人保持良好的寫作,絕不會因其不協調動作而打傷人,可以很好地與制造現場的人員進行協作。
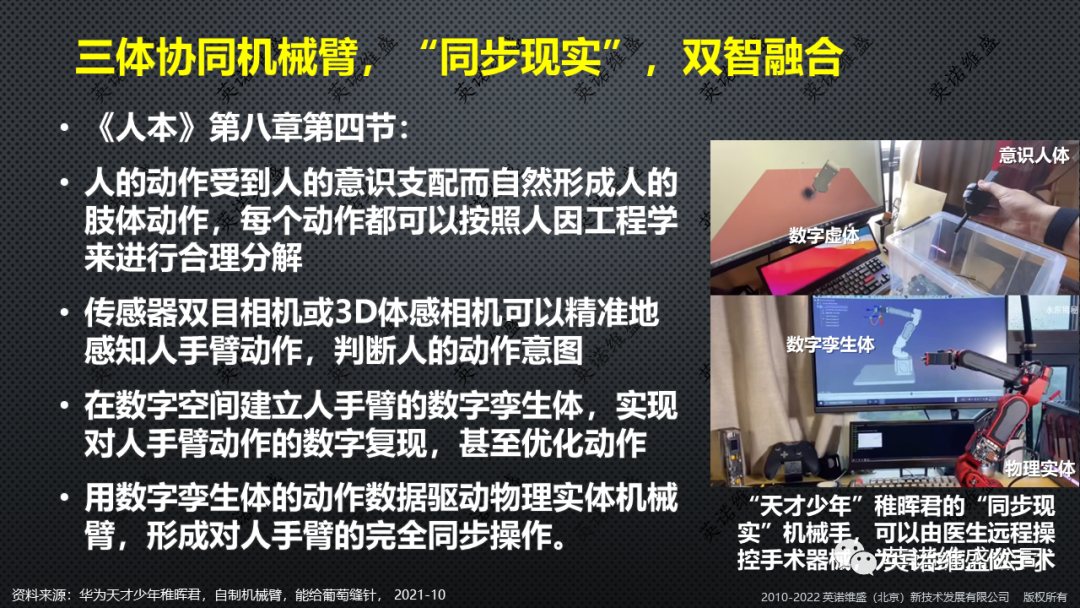
另一個雙智融合的例子是,華為“天才少年”稚暉君自制的具有“同步現實”功能的機械臂。在他研制的系統中,相當于開發了一個能夠綜合實現意識人體(即人手臂)、數字虛體(即數字機械臂)、物理實體(即實體機械臂)三體協同的、實現“同步現實”的智能機械臂。詳細的實現過程是:
人的動作受到人的意識支配而自然形成人的肢體動作,每個動作都可以按照人因工程學來進行合理分解;
傳感器雙目相機或3D體感相機可以精準地感知人手臂動作,判斷人的動作意圖,并且在數字空間建立人的手臂和人手握持物的數字虛體(如最上圖);
在數字空間建立人手臂的數字孿生體,實現對人手臂動作的數字復現,甚至優化動作;
用數字孿生體的動作數據驅動物理實體機械臂,形成對人手臂的完全同步操作。大家可以看到,物理實體機械臂、它的數字孿生體、人的手臂之間,保持著完全同步的動作。
這樣,這款“同步現實”的機械手,就可以由醫生遠程操控某種手術器械,為身在異地的病人做手術了。稚暉君親自嘗試了操控用機械手穿針引線,縫好了一顆破損的葡萄皮。
雙智融合,無論是“人智”還是“機智”,無論是分立還是共融,其目的都是以人為本,利人賦能,為人服務。面對老齡化日益嚴重的社會現實,日本提出了“社會5.0”戰略:
核心思想是,以人為本,具體舉措是讓人與界面友好、善解人意的服務機器人共生共融,細分需求,定制服務,改善生活品質,預測潛在需求,消除由于地區、年齡等造成的服務差異。
技術路線是,讓不同領域的獨立系統聯網并協調工作,以“群智”方式提高自律化和自動化程度。
“人智”“機智”共融,一切以人為本,前面三種范式綜合起來,形成以人為本、利人賦能、雙智融合的智能解決方案。

如我在本講座開篇所言,工業轉型升級,必須以人文本。
在前些年學習德國人的“工業4.0”的過程中,我就發現,其中并沒有涉及到對人的聯接與賦能,以人為本是強調不夠的。果然,在2021年,歐盟發布了“工業5.0”,歐洲開始為工業4.0補課,開始著重強調以人為本了。
在“工業5.0”的文件中提到:工業5.0的概念也可以被描述為重新引入“以人為本/以價值為中心的工業4.0”的缺失維度。…工業5.0的核心技術與工業4.0基本一致,而更加注重以人為中心的技術構成了工業5.0的基礎。
不應將工業5.0理解為更換品或替代品,而是現有工業4.0范式的演變和邏輯延續。因此,工業5.0的概念不是基于技術,而是以價值為中心,例如以人為本、生態或社會效益。
工業5.0的以下特點得到了特別強調:將人類和技術技能和優勢結合起來,使工業和工業人互惠互利,不是技術取代人,而是與人互補。這使得工作環境更安全、更令人滿意、更符合人體工程學,在這種環境中,人類可以利用自己的創造力解決問題,扮演新角色,提高技術技能。

四個智能范式,在演變發展上,是有規律可循的。
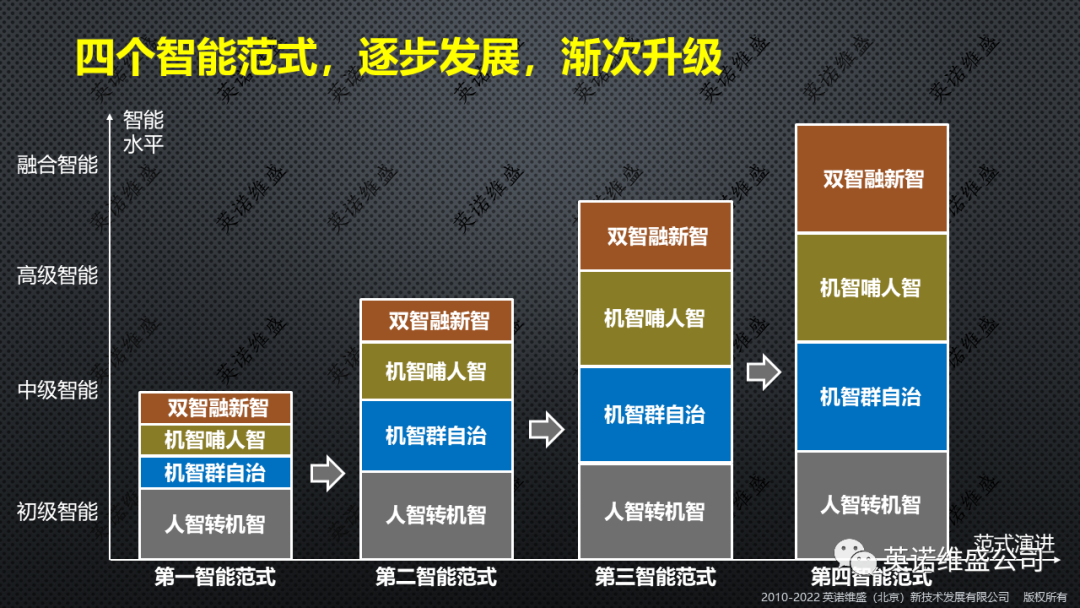
這張圖展示了四個智能范式的發展演變過程。橫軸表示的是范式演進過程,縱軸表示的是智能水平。
四個智能范式,既在工業互聯網、智能制造實踐中長期共存,又按照范式順序次第演進,每一個智能范式都在前一個范式基礎上成長提升,向上進階,在智能水平上,也從初級智能、中級智能,發展到高級智能、融合智能,形成了一個完整的智能范式發展序列。
第一智能范式,“人智”轉“機智”是最初的智能范式,已經持續了幾十年;
第二智能范式,進入新世紀后,智能機器互聯群體越來越龐大,越來越自主和自治;
第三智能范式,“機智”達到一定程度后開始反哺人類,利人賦能;
第四智能范式,未來“人智”和“機智”融為一體,形成高度智能、高度發達的數字工業乃至工業元宇宙,推動中國乃至全球數字經濟的發展,繁榮人類的數字文明。
[敏感詞],我對今天講到的內容做一個小結:
第一范式:“人智”轉“機智”——將人的“碳基知識”轉為 “硅基”知識,通過賽博物理系統CPS的形式賦能機器,讓物理實體機器變成智能機器。
第二范式:“機智”群自治——智能機器聯接更多智能機器,組建智能機器網絡,機器引導機器,機器驅動機器,形成機器群智。
第三范式:“機智”哺“人智”——讓匯聚了前人海量知識與智慧的智能機器,補充個體人的智力水平差異,形成智能機器對人的智力反哺,讓常人甚至技術弱者成為研發與生產高手。
第四范式:雙智融新智——人機融合智能,真正做到以人為本,利人賦能,共建數字文明。
四個范式,次第發展,有序演進,形成發展工業轉型升級的新格局,已經切實存在于工業現場和企業實踐中,只不過是由我進行了提煉和整理,呈現給大家。
遵循四個基本范式,智能制造、工業互聯網必將不斷創新發展,行穩致遠。





Copyright ? 深圳市金航標電子有限公司 版權所有 粵ICP備17113853號
